TGO's colour and stereo camera: An interview with Nicolas Thomas, Principal Investigator of CaSSIS
The first mission of ESA's ExoMars programme, which is scheduled to arrive at Mars in October 2016, consists of the Trace Gas Orbiter (TGO) plus Schiaparelli, an entry, descent and landing demonstrator module.
The scientific payload on the TGO includes CaSSIS (Colour and Stereo Surface Imaging System), a high-resolution camera that will obtain detailed pictures of the Martian surface.
The Principal Investigator for CaSSIS is Nicolas Thomas from the University of Bern in Switzerland. We asked him to tell us more about the instrument that he and his colleagues have developed.
What is CaSSIS?
 |
|
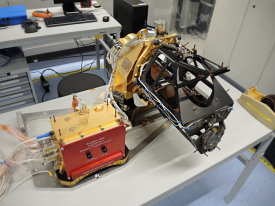
CaSSIS flight model. Photo credit: University of Bern |
CaSSIS is a colour imager that will obtain high-resolution images of the Martian surface. The telescope's aperture is around 13.5 cm in diameter, and the 4 mirrors comprising the telescope are held in a carbon-fibre reinforced polymer (CFRP) structure. The focal plane consists of a single silicon hybrid detector with 4 colour filters mounted on it.
Both the telescope and focal plane are mounted on a rotation mechanism. This allows us to solve two key problems. Firstly, the rotation of the spacecraft about the nadir direction can be compensated for, and secondly, the rotation mechanism can be swivelled by 180 degrees to acquire an almost instantaneous stereo image of a target.
How will CaSSIS operate?
The TGO will initially be placed in an elliptical orbit around Mars. It will take 9-15 months to circularise the orbit by using the resistance of the thin upper atmosphere. We will be able to take some images of the surface between the active phases of this aerobraking procedure.
TGO's final, circular, orbit will be inclined 74 degrees to the planet's equator. This means that the spacecraft will pass over most of the planet, and we will be able to obtain detailed images of the massive volcanoes, Valles Marineris, dry valley systems and the southern highlands. We will also be able to tilt the spacecraft a little in order to observe near-polar regions, though we won't be able to see all the way to the poles.
With a spatial resolution of 4.6 m per pixel from an altitude of 400 km, CaSSIS should provide sharper images than all previous imagers, with the exception of the High Resolution Imaging Science Experiment (HiRISE) on NASA's Mars Reconnaissance Orbiter.
 |
|
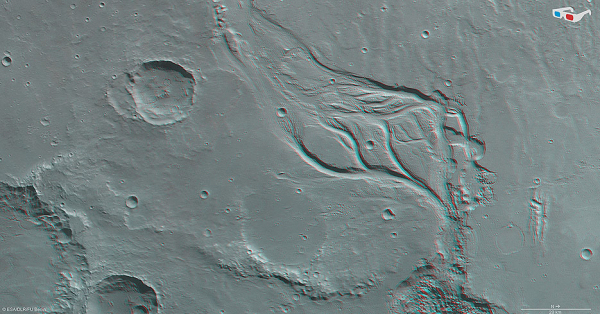
3D anaglyph image of Osuga Valles on Mars, taken by the HRSC instrument on Mars Express. Credit: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO |
However, the rotating mechanism of CaSSIS enables it to look 10 degrees ahead and 10 degrees behind the spacecraft to acquire a stereo pair. This means that we can obtain stereo images within a very short space of time, unlike the other imagers on other spacecraft that can only take two images of the same area during different orbits.
CaSSIS will be able to cover about 2% of the planet each year, so we will concentrate on imaging areas of particular interest. Most of these will be stereo pictures, but we will take single images too.
What are the science objectives for CaSSIS?
The images should complement the data sent back by the other instruments on the Trace Gas Orbiter by searching for the sources of any detected localised trace gases. They will also enhance our knowledge of the planet by extending the observations of NASA's HiRISE and CTX (the context camera on Mars Reconnaissance Orbiter), and the stereo camera on ESA's Mars Express.
Since TGO will not be in a Sun-synchronous orbit – unlike NASA spacecraft equipped with imagers – we will be able to study the surface at all times of the Martian day. This means that we can study many dynamic surface processes, including ice sublimation and condensation at the edges of the polar caps, diurnal changes in dust devil production, dust avalanches, and the evolution of the Recurring Slope Lineae which made a big "splash" in the press recently because of their connections to liquid water.
How did CaSSIS come about?
In January 2010, ExoMars was envisaged as a joint ESA-NASA programme for the investigation of Mars. The University of Arizona and the University of Bern put forward a proposal for an imaging system called HiSCI. When NASA and ESA could not reach agreement on hardware provision, the University of Arizona had to withdraw.
The University of Bern took over the lead with a revised concept called CaSSIS. However, we had only two years to develop and test the new instrument, so we tried to find ways of using existing hardware. Fortunately, we were able to use a spare primary mirror, which would normally have taken 14 months to manufacture. We were also able to re-use the focal plane assembly of the SIMBIO-SYS instrument being developed for ESA's BepiColombo mission.
These compromises forced us to modify the instrument's design and gave us a few problems, but we are very happy with the final result.
What will happen to CaSSIS before the launch?
We've completed the vacuum, vibration, and electromagnetic tests, and have sent the instrument to Thales Alenia Space in Cannes, France, where the spacecraft is being assembled. CaSSIS will then undergo verification tests to ensure the instrument can talk to the ground through the spacecraft before transport to the launch site.
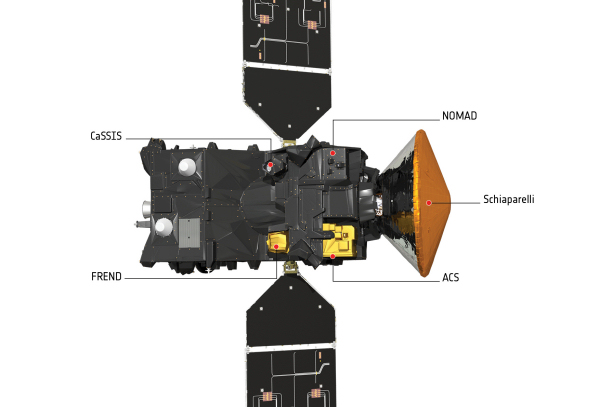 |
| Artist's impression of the ExoMars 2016 Trace Gas Orbiter (TGO) and Schiaparelli. The location of the four scientific instruments on the TGO are indicated. Credit: ESA/ATG medialab |
How are you preparing to interpret CaSSIS data?
The CaSSIS science team will select particular regions to be studied so we will know what areas have to be covered. We then have to schedule the imaging that we'll do with CaSSIS when routine science operations begin in 2018. Once acquired, the data from CaSSIS will be sent back every day to the mission operations centre (at the European Space Operations Centre, Darmstadt) and the science operations centre (at the European Space Astronomy Centre, near Madrid), and we will pull the data from them for processing and analysis. We are setting up a calibration pipeline to take out all the instrument defects before stitching them together to produce our primary data products. The data can then be passed to the scientists to see if they got what they were after.
We will try to make the data public as quickly as possible. A three-month turnaround (from acquisition to release) should be feasible when we get into routine operations.
Who are the CaSSIS team?
A team from the University of Bern designed and assembled the instrument. RUAG Space in Switzerland built the telescope. The detectors and readout electronics came from SELEX in Italy, with assistance from the University of Padova.
 |
| Nicolas Thomas (third from right, back row) with the CaSSIS team from the University of Bern. Credit: University of Bern |
We were also fortunate to get help from the Space Research Centre in Warsaw, who provided the power converter unit. SGF in Hungary provided the flight software. We have also been lucky to have some support from University of Arizona to help us with the software we need for targeting.

