The ExoMars drill unit
The ExoMars Drill is devised to acquire soil samples down to a maximum depth of 2 metres, in a variety of soil types.
 |
Its main function is to penetrate the soil, acquire a core sample (reference is 1 cm in diameter × 3 cm in length), extract it and deliver it to the inlet port of the Rover Payload Module, where the sample will be distributed, processed and analyzed by the Analytical Laboratory Drawer.
The ExoMars Drill embeds the Mars Multispectral Imager for Subsurface Studies (Ma-Miss onward) which is a miniaturised IR spectrometer devoted to the borehole exploration.
Drill design
 |
The Drill is being designed to penetrate in different type of soils envisaged on Mars with the operational lifetime required by the ExoMars mission scenarios, which include the completion of 7 experiment cycles and at least 2 vertical surveys down to 2 metres (with four sample acquisitions each). This means that a minimum number of 17 samples shall be acquired and delivered by the Drill for subsequent analysis.
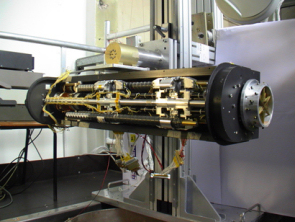
Drill elements
The Drill Unit consists mainly of the following elements:
- A Drill Tool - About 700 mm long, equipped with the sample acquisition device, inclusive of a shutter, movable piston, position and temperature sensors, etc.) and with Ma_Miss tip components (optical fibre, lamp, window, reflector).
- A set of (3) Extension Rods - About 500 mm each, designed to extend the penetration length to 2 metres. They are provided with electrical contacts and guarantee the transmission of the optical signal to the Ma_Miss spectrometer, located in the upper part of the Drill Unit.
- A Rotation-Translation Group - Including the sliding carriage motors and sensors, the gear mechanisms, the Ma_Miss optical rotary joint.
- A Drill Box Structure- Including the clamping system for the rods (rod magazine group), and the automatic engage-disengage mechanism for the rods. On the drill box structure the Ma_Miss spectrometer and the drill proximity electronics are installed.
- A back-up Drill Tool - For non-nominal situations.
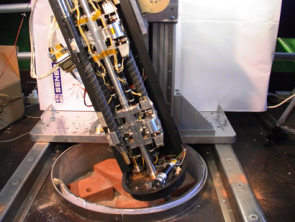
The Drill Unit is supported by a dedicated positioning system, capable of deploying it from its storage position on the front of the Rover chassis to its operational position, orthogonally to the terrain, and to allow the delivery of the acquired soil sample to the SPDS inlet port.
The Drill positioning system will also be equipped with an emergency jettison device, to be used in case the unit would remain blocked in the terrain, endangering the Rover mobility and the continuation of the mission.
The Drill Unit materials and assembly, integration and verification (AIV) approach will be compatible with the class IVb planetary protection directives applicable to the ExoMars Mission.