The ExoMars Rover Instrument Suite
Looking for signatures of life on Mars
An accurate visual and spectral characterisation of the surface of Mars is fundamental to establish the geological context at the sites that the Rover will visit. This can be complemented by electromagnetic and neutron subsurface investigations, which will further contribute to understand the depositional environment (e.g. sedimentary, volcanic, Aeolic). Knowledge of the geological history of past water environments constitutes a necessary step in the search for traces of past or present signatures of life on Mars.
Data from the novel suite of instruments on-board the ExoMars rover will help scientists to conduct a step-by-step exploration of Mars, beginning at panoramic (metre) scales and progressively converging to smaller (sub-millimetre) studies, concluding with the molecular identification of organic compounds.
Instruments in brief
| PanCam - The Panoramic Camera |
| To perform digital terrain mapping of Mars. |
| Principal Investigator: Andrew John Coates, MSSL/University College London, London, United Kingdom Co-Principal Investigator (High Resolution Camera): Ralf Jaumann, DLR/IPF, Berlin, Germany Co-Principal Investigator (Wide Angle Cameras): Jean-Luc Josset, Institute for Space Exploration, Neuchâtel, Switzerland. |
| ISEM - Infrared Spectrometer for ExoMars |
| To assess the mineralogical composition of surface targets. Working with PanCam, ISEM will contribute to the selection of suitable samples for further analysis by the other instruments. |
| Principal Investigator: Oleg Korablev, Space Research Institute (IKI), Moscow, Russia |
| CLUPI - Close - UP Imager |
| A camera system to acquire high-resolution colour close-up images of rocks, outcrops, drill fines and drill core samples. |
| Principal Investigator: Jean-Luc Josset, Space Exploration Institute, Neuchâtel, Switzerland Co-Principal Investigator: Frances Westall, Centre de Biophysique Moléculaire, Orléans, France Co-Principal Investigator: Beda Hofmann, Natural History Museum, Bern, Switzerland. |
| WISDOM - Water Ice and Subsurface Deposit Observation On Mars |
| A ground-penetrating radar to characterise the stratigraphy under the rover. WISDOM will be used with Adron, which can provide information on subsurface water content, to decide where to collect subsurface samples for analysis. |
| Principal Investigator: Valérie Ciarletti, LATMOS, France Co-Principal Investigator: Svein-Erik Hamran, FFI, Norway Co-Principal Investigator: Dirk Plettemeier, TU-Dresden, Germany. |
| Adron |
| To search for subsurface water and hydrated minerals. Adron will be used in combination with WISDOM to study the subsurface beneath the rover and to search for suitable areas for drilling and sample collection. |
| Principal Investigator: Igor Mitrofanov, Space Research Institute (IKI), Moscow, Russia. |
| Ma_MISS - Mars Multispectral Imager for Subsurface Studies |
| Located inside the drill, Ma_MISS will contribute to the study of the Martian mineralogy and rock formation. |
| Principal Investigator: Maria Cristina De Sanctis, Istituto di Astrofisica Spaziale e Fisica Cosmica (IASF), INAF, Italy. |
| MicrOmega |
| A visible plus infrared imaging spectrometer for mineralogy studies on Martian samples. |
| Principal Investigator: Jean-Pierre Bibring, Institut d’Astrophysique Spatiale, Orsay, France Co-Principal Investigator: Frances Westall, Centre de Biophysique Moléculaire, Orléans, France Co-Principal Investigator: Nicolas Thomas, University of Bern, Switzerland. |
| RLS - Raman Spectrometer |
| To establish mineralogical composition and identify organic pigments. |
| Principal Investigator: Fernando Rull Perez, Centro de Astrobiología, Unidad Asociada (CSIC-UVA), Spain Co-Principal Investigator: Sylvestre Maurice, Laboratoire d'Astrophysique - Observatoire Midi-Pyrénées (LAOMP), France. |
| MOMA – Mars Organic Molecule Analyser |
| MOMA will target biomarkers to answer questions related to the potential origin, evolution and distribution of life on Mars. |
| Principal Investigator: Fred Goesmann, Max-Planck-Institute for Solar System Research, Lindau, Germany Co-Principal Investigator: Francois Raulin, University of Paris 12 and 7, Paris, France. |
PanCam - the Panoramic Camera
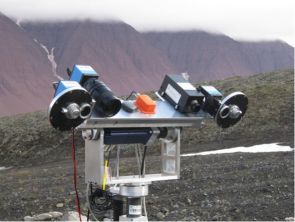 |
| The PanCam prototype during tests in Mars-like conditions. Credit: AMASE |
The PanCam - panoramic camera - has been designed to search for textural information on rocks (for example, laminations or pitting) that can be related to the presence of organisms on Mars. PanCam will also capture other information that will help in revealing the geological characteristics of the Martian environment.
This instrument will provide stereo and 3D imagery of the terrain around the Rover, for the benefit of the mission as a whole. In particular, the Panoramic Camera will be used:
- To help locate the landing site and Rover position with respect to local geographical references;
- To provide the geological context of the sites explored by the Rover;
- To support the selection of the best sites to carry out exobiology studies;
- To study properties of the atmosphere and of other variable phenomena.
PanCam will also support the scientific measurements of other Rover instruments. It will capture high-resolution images of locations that are difficult to access, such as craters or rock walls. Then, it will monitor the sample from the drill before it is ingested and crushed inside the Rover, where the Analytical Laboratory instruments will perform a detailed chemical, physical, and spectral analysis.
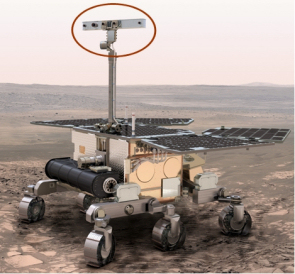 |
| The PanCam mounted on the Rover mast. Credit: ESA |
PanCam is composed of:
- Two Wide Angle Cameras (WACs), for panoramic imaging (37° field of view, fixed focus); both "eyes" are equipped with a 12-position filter wheel each covering a different wavelength, thus enabling multispectral observations;
- One High Resolution Camera (HRC), for high-resolution colour imaging (5° field of view, with an autofocus mechanism);
- The PanCam Interface Unit (PIU), the "brain" of the instrument communicating with the Rover.
These three elements are grouped on an optical bench arranged on the Pan-Tilt Unit on top of the ExoMars rover mast assembly.
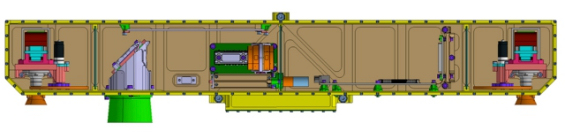 |
| The ExoMars PanCam optical bench. Credit: University College London - Mullard Space Science Laboratory |
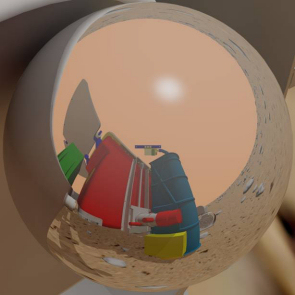
PanCam is supplemented by a 5-cm diameter calibration target and by a small spherical mirror, the Rover Inspection Mirror (RIM), which enable the camera to capture images of items that are not directly in the field of view. The images taken are then processed and can be used to check the status of the Rover.
 |
 |
| Image as seen in the Rover Inspection Mirror of PanCam. Credit: Aberystwyth University |
The flattened image of the Rover Inspection Mirror of PanCam after the processing. Credit: Aberystwyth University |
Instrument update
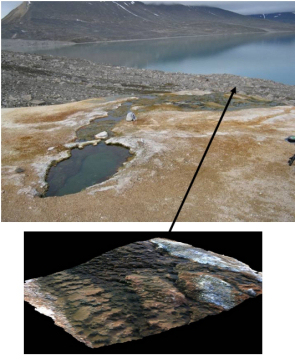 |
| An image taken by the PanCam prototype (top) used as input to create a realistic model of the terrain (bottom). Credit: AMASE, C.Cousins, Joanneum Research |
A number of tests for PanCam have been carried out, including a series of tests in simulated Martian conditions (AMASE expeditions) using a prototype of the instrument. The images taken in the field in August 2009 were used as inputs to create realistic 3D models of the terrain.
Moreover, a 'blind test' was carried out in May 2009 to assess the contribution of the wide-angle analogue cameras (WAC), the high resolution camera breadboard (HRC) and a simulated close-up imager in identifying the nature of sample rocks. The combination of WAC and HRC images were in most cases sufficient to enable the nature of the rock to be identified, while some minerals could only be classified with certainty with the close-up imager.
| PanCam participants |
| Principal Investigator Andrew Coates, MSSL/University College London, London, United Kingdom Co-Principal Investigators High Resolution Camera: Ralf Jaumann, DLR/IPF, Berlin, Germany Wide Angle Cameras: Jean-Luc Josset, Space Exploration Institute, Neuchâtel, Switzerland |
| ESA contact |
| ExoMars instrument system engineer Andrew Ball, Directorate of Science and Robotic Exploration, European Space Agency |
| More instrument details |
| The PanCam Instrument for the ExoMars Rover Coates, A.J., et al., Astrobiology, July 2017, 17(6-7), 511-541 https://doi.org/10.1089/ast.2016.1548 |
ISEM - Infrared Spectrometer for ExoMars
The ISEM instrument is a mast-mounted infrared spectrometer, designed to determine the major mineral composition of distant rocks, outcrops, and soils. ISEM will be used to help scientists decide which surface targets the ExoMars Rover should approach for a more detailed investigation.
ISEM is mounted on the Rover's mast together with the PanCam High-Resolution Camera (HRC) and Wide Angle Cameras (WAC). ISEM can be pointed to the desired direction in azimuth and elevation by means of the mast's pan and tilt mechanism. During a typical operation, the PanCam WAC, which has a field-of-view of 37° × 37°, will image a large panorama, while the PanCam HRC, with a field-of-view of 5° × 5°, will image a few targets within this panorama at high resolution. At the same time, ISEM, which has a field-of-view of 1°, will measure the infrared characteristics of these same targets by recording the spectra of solar light reflected from the planet's surface and modified by absorption and scattering in the atmosphere. Using the combined visual plus spectroscopic characterisation, the science team on Earth will be able to help plan Rover operations by choosing the most promising targets for drilling.
The spectrometer will also be used to identify and map the distribution of rocks that have had a change in composition caused by chemical weathering due to interaction with water-bearing ices, liquids, and vapours. This process is known as aqueous alteration. Of particular interest are measurements that will allow scientists to distinguish between various classes of silicates, oxides, hydrated minerals and carbonates.
ISEM will also study variations of the atmospheric dust properties and of the gaseous composition of the atmosphere.
The main science objectives of ISEM are:
- To search for and study minerals bearing hydroxide (OH) or water (H2O)
- To carry out a geological investigation and study of minerals and rocks in the thin uppermost layer of the martian surface
- To identify and map the distribution of any aqueous alteration products on the landing site
- To perform a real-time assessment of the composition of the surface in selected areas, to support the identification and selection of the most promising drilling sites
- To study variations of the properties of atmospheric dust and of the gaseous composition of the atmosphere, in as far as this is possible with limited number of observation cycles
ISEM is an infrared acousto-optical tunable filter (AOTF) spectrometer, operating in the spectral range 1.15 μm to 3.3 μm with a spectral resolution better than 25 cm-1, and a field-of-view of 1°. The instrument, which has a mass of 1.3 kg, consists of two blocks; the optical box, mounted on the mast of the Rover so that the field-of-view of ISEM is kept within the field-of-view of the PanCam HRC, and the electronics box, mounted inside the thermo-stabilized compartment of the Rover.
| ISEM participants |
| Principal Investigator Oleg Korablev, Space Research Institute (IKI), Moscow, Russia Project manager Andrei Ivanov, Space Research Institute (IKI), Moscow, Russia Russian Payload Manager Daniel Rodionov, Space Research Institute (IKI), Moscow, Russia |
| ESA contact |
| ExoMars instrument system engineer Andrew Ball, Directorate of Science and Robotic Exploration, European Space Agency |
| More instrument details |
| Infrared Spectrometer for ExoMars: A Mast-Mounted Instrument for the Rover Korablev, O.I., et al., Astrobiology, July 2017, 17(6-7), 542-564 https://doi.org/10.1089/ast.2016.1543 |
CLUPI - Close-UP Imager
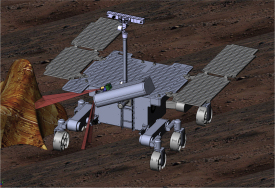 |
| Illustration of CLUPI mounted on the ExoMars rover. Credit: Space Exploration Institute |
The Close-UP Imager (CLUPI) is a camera system designed to acquire high-resolution, colour, close-up images of outcrops, rocks, soils, drill fines and drill core samples. The visual information obtained by CLUPI will be similar to what a geologist would get using a hand lens – if they were on Mars!
The camera system will take images of rock and unconsolidated material at the tens of micrometres to centimetre scale. These images will help scientists determine the environment – for example: aqueous, volcanic, etc. – that gave rise to the rocks that are analysed. This will provide the geological context and therefore improve the scientists' ability to interpret the results obtained by the other rover instruments.
Another very important objective of CLUPI will be to search for morphological biosignatures on outcrops. The primitive types of microorganisms that could have existed on Mars would be very small, probably less than a micron to not more than a few microns in size, but their colonies and biofilms are much larger. Traces of these features may be preserved in the Martian rocks either as mineral-replaced structures and/or as carbon remains trapped in the Martian sediments and encased in a mineral cement. Although the individual cells will be too small to be recognisable in outcrop by CLUPI (complex sample preparation and use of powerful microscopes is necessary for this), the Close Up Imager will be able to image concentrations of colonies forming a spotted, carbon-rich texture called thrombolitic, or forming laminar biofilms.
CLUPI will be an imager with the ability to focus from 10 cm to infinity. At a distance of 10 cm from the object, the resolution of the images will be high – about 7 µm/pixel. To give colour images, the camera will have three layers of pixels – red, green and blue.
CLUPI will also have the possibility to perform z-stacking (or focus stacking) of images when necessary. Z-stacking is a processing technique that combines multiple images taken at different focus distances. The portions that are in focus are extracted to create a new image that has a greater depth of field than any of the original individual images.
| CLUPI instrument characteristics | |
| Detector type | Full colour APS (Active Pixel Sensor) |
| Image dimension | 2652 pixels × 1768 pixels; 3 colours |
| Field of View | 14° ± 2° diagonal (11.9° × 8.0°) |
| Image resolution Viewed area |
7 µm/pixel at 10 cm distance, viewed area 1.9 cm × 1.3 cm 39 µm/pixel at 50 cm distance, viewed area 10 cm × 7 cm 79 µm/pixel at 100 cm distance, viewed area 21 cm × 14 cm |
| Focal length | Varying, can take sharp images from 10 cm to infinity |
| Exposure time | Up to 1024 seconds |
| Spectral range | 400 – 700 nm |
| On-board data processing | Automatic exposure time; autofocusing; binning 2×2 and 4×4; z-stacking (between 2 and 16 images); windowing |
CLUPI will be located on the drill box of the ExoMars rover. By using the degrees of freedom provided by both the rover and the drill box, CLUPI will be angled and raised so it can observe in a variety of viewing modes. The use of two fixed mirrors – one flat and one concave – will provide three fields of view (FOV).
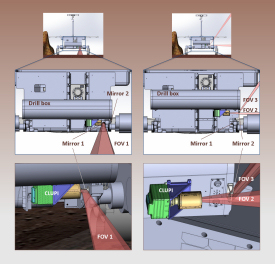 |
| Illustration of CLUPI's fields of view. Credit: Space Exploration Institute |
For the geological survey, CLUPI will observe the area immediately in front of the rover, using one of the fields of view – FOV1. This will allow scientists to characterise the physical properties of rocks, such as texture, structure and morphology. In this mode the soil, and in particular the rover's track marks, can also be examined in great detail.
For close-up outcrop observation, CLUPI will look to the side, using another field of view – FOV2. In this mode, and by using the rover's motion, CLUPI can be panned across a rock surface to image its structure. A major goal of this observation mode is to identify water-related information. Colour and layering variations will help to determine a target's geological history and its potential for preserving biosignatures.
The observation of the drilling area will also involve CLUPI's FOV2. As the drill box is rotated, CLUPI can either be in a low position or in a high position. In the low position, it may be able to help characterise rocks and structures, such as crystals in igneous rocks, fracture mineralization, secondary minerals, sediment components and soil particles. In the higher position, CLUPI can achieve a wider coverage, albeit with a somewhat lower resolution.
While the drilling operation is being performed, CLUPI's third field of view - FOV3 - can be used to monitor the process and observe the mound of fines that is generated. Colour and textural variations can be used to infer if the drill has encountered a different type of material or deposit. FOV3 can also be used to obtain information on the soil's mechanical properties, such as grain size, shape and cohesion.
After the drilling operation has been completed and the drill has been retracted, FOV2 can be used to image the state of the surface after drilling, the amount of dislodged fines, their colour and physical properties. From the high position, CLUPI will be able to observe the borehole to a depth of approximately 10 cm, depending on the local illumination conditions; from the low position the visible borehole depth will be 6 cm.
Finally, CLUPI's FOV3 will be used to image the collected core prior to delivery to the rovers' analytical laboratory for further processing and studies. Whereas the PanCam high-resolution camera can obtain a total-view image of the core sample, only CLUPI can image the sample at very high resolution. This will be important for recording the sample's shape, colour, homogeneity, texture, mineral grain size and colours. This information can then be used to compare the core sample with the sampling area, providing a link between surface and subsurface analyses.
| CLUPI participants |
| Principal Investigator Jean-Luc Josset, Space Exploration Institute, Neuchâtel, Switzerland Co-Principal Investigator Frances Westall, Centre de Biophysique Moléculaire, Orléans, France Co-Principal Investigator Beda Hofmann, Natural History Museum, Bern, Switzerland |
| ESA contact |
| ExoMars instrument engineer Frederic Haessig, Directorate of Science and Robotic Exploration, European Space Agency |
| More instrument details |
| The Close-Up Imager Onboard the ESA ExoMars Rover: Objectives, Description, Operations, and Science Validation Activities Josset J.-L., et al., Astrobiology, July 2017, 17(6-7), 595-611 https://doi.org/10.1089/ast.2016.1546 |
WISDOM - Water Ice and Subsurface Deposit Observation on Mars
 |
| The WISDOM prototype during field tests in the French Alps, in January 2011. Credit: LATMOS |
The instrument suite of the ExoMars rover includes WISDOM (Water Ice Subsurface Deposit Observation on Mars), a radar that will provide a detailed view of the Red Planet's shallow subsurface structure by sounding the upper layers of its crust. Unlike traditional imaging systems or spectrometers, which are limited to studying the visible surface, this radar will access what lies beneath. WISDOM will provide the three-dimensional geological context of the terrain covered by the Rover. This additional perspective is vital for a better understanding of the planet's evolution, and the impact of its changing geology and climate on past and present habitability.
WISDOM will study the nature of the subsurface remotely, using radar pulses from a UHF ground penetrating radar, covering the frequency range from 500 MHz to 3 GHz, to map the subterranean layers. It will provide high-resolution measurements, with a vertical resolution of a few centimetres, down to a depth of 3 metres, complementing the 2-metre reach of the Rover's drill. The instrument can transmit and receive signals using two small antennas mounted on the back of the Rover. The WISDOM measurements will be used to identify optimal drilling sites by determining the nature, location and size of potential targets, and to ensure the safety of the drilling operations by minimising the likelihood of contact with potential hazards.
 |
| The WISDOM prototype during field tests in Mount Etna, Italy, in October 2010. Credit: LATMOS |
WISDOM's main science objectives are:
- To investigate the three-dimensional geology and geological evolution of the landing site, and provide information on the general physical characteristics of local rocks, the rock layering and structure;
- To characterise the electromagnetic properties of Martian soil in order to map the scale of diversity in the shallow subsurface; and
- To observe the local distribution of well-compacted, sedimentary deposits that may have been associated with a water-rich environment in the past.
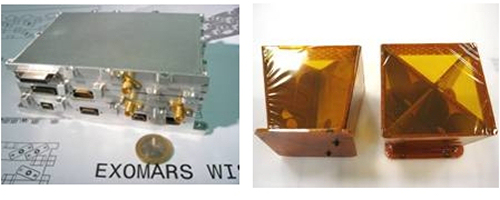 |
| The WISDOM electronic unit (left) and its two antennas (right). Credit: LATMOS |
The profile of the subsurface geological structure will also complement the information from other instruments on the Rover, such as MicrOmega and the Raman spectrometer.
WISDOM's observations will also be combined with those produced by the Rover's panoramic camera, PanCam, and with analyses carried out on previously collected samples to construct three-dimensional maps of the subsurface.
Instrument update
A prototype, representative in terms of design, size, mass and power, has been developed. It has been tested successfully in a laboratory environment by sounding targets such as plates and spheres to validate its design specifications and verify its functionality.
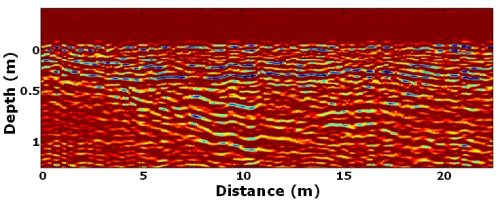 |
| Fine layering mapped by the WISDOM prototype in a pyroclastic environment in Mount Etna, Italy, October 2010. Credit: LATMOS |
Tests under quasi-realistic conditions have shown the instrument performance to be satisfactory. A field test was performed, on a glacier in the French Alps near Chamonix. The prototype carried out measurements down to more than 15 metres and detected structures with deep cracks. A series of tests in a variety of more complex environments and simulated Martian conditions began at the end of 2010, with a field test in Mount Etna, Italy, where the prototype successfully mapped the layers of the shallow subsurface.
| WISDOM participants |
| Principal Investigator Valérie Ciarletti, LATMOS, France Co-Principal Investigators Dirk Plettemeier, TU-Dresden, Germany Svein-Erik Hamran, FFI, Norway |
| ESA contact |
| ExoMars instrument system engineer Frederic Haessig, Directorate of Science and Robotic Exploration, European Space Agency |
| More instrument details |
| The WISDOM Radar: Unveiling the Subsurface Beneath the ExoMars Rover and Identifying the Best Locations for Drilling Ciarletti, V., et al., Astrobiology, July 2017, 17(6-7), 565-584 https://doi.org/10.1089/ast.2016.1532 |
Ma_MISS - Mars Multispectral Imager for Subsurface Studies
 |
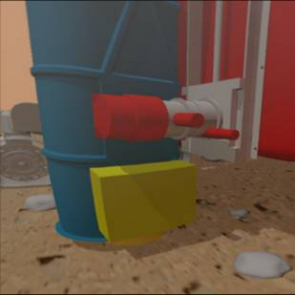
| The drill and Ma_MISS prototypes during a series of drilling and sampling tests. Credit: SELEX Galileo |
Located inside the ExoMars Rover's drill, Ma_MISS, the Mars Multispectral Imager for Subsurface Studies, will be the instrument in closest contact with the Martian subsurface. Ma_MISS will image the walls of the borehole created by the drill to study Martian mineralogy and rock formation. This will provide valuable information for the study of subsurface soil and rock layers (i.e., stratigraphy), the distribution and state of water-related minerals, and will help to characterise the geophysical Martian environment.
As the Rover drills into the upper surface of Mars, Ma_MISS will illuminate the hole's cylindrical wall through a transparent window situated in the drill tool. It will capture the reflected light, analyse its spectrum, and transfer the data on the hole stratigraphy to the Rover computer for further analysis and relay to Earth.
Ma_MISS exploits the movement of the drill to acquire data from all around the borehole. The rotation of the instrument as it descends will allow images to be built up in both horizontal (ring image) and vertical sequences (column image).
Ma_MISS's main science objective is to study the Martian subsurface. This is key to understanding the chemical and physical processes that led to the formation and evolution of the site being investigated.
The Martian surface is highly influenced by external processes such as weathering, erosion, sedimentation and impact, all of which alter its original properties. The investigation of subsurface layers is the only approach that permits measurements on samples close to their original composition. The analysis of unexposed material by Ma_MISS, together with data obtained from the spectrometers located inside the Rover (Raman, MicrOmega, MOMA), will be crucial for the interpretation of the original conditions of rock formation on Mars.
In-situ analysis of the Martian subsurface provides information that can be used in the following investigations:
- Assessing the habitability of the drilling site and searching for possible indicators of life.
- Determining the presence of ice or water at the drilling site.
- Documenting the mineral distribution and composition, and identifying the nature of local geology and chemistry.
- Studying the Martian surface layers in terms of hazards and resources relevant to the potential for survival of humans on the surface.
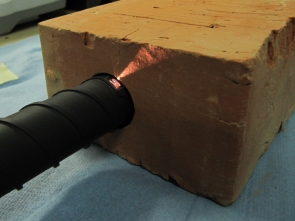
 |
| The sapphire window on the drill permits observation of the Martian soil, while the Ma_MISS optical head is protected from scratches and dust. Credit: SELEX Galileo |
The Ma_MISS instrument includes:
- the optical head, which illuminates the borehole with a spot of approximately 1 mm diameter and then collects the reflected light coming from a 0.1 mm diameter area;
- the illumination system, located 0.2 mm from the window;
- the optical fibre, which transmits the light from the illumination system to the optical head and collects the reflected light to convey it to the spectrometer;
- the spectrometer, which acquires the collected visible and infrared light (0.4 µm - 2.2 µm) and measures its spectrum with a high precision (20 nm spectral resolution);
- the transparent sapphire window, which is placed on the wall of the drill to enable the observation of the soil, preventing the contamination by dust of the internal optical and mechanical elements and the risk of damage (scratches) to its surface; sapphire is almost as hard as diamond.
Part of the Ma_MISS electronics is located in a dedicated unit mounted outside the drill box. The transmission of power and data is possible through electrical and optical joints between the drill tool and the Ma_MISS unit. The Ma_MISS instrument elements are exceptionally miniaturised to comply with the limited space available inside the drill.
Instrument update
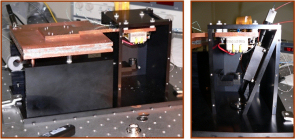
 |
| The drill prototype with the Ma_MISS sapphire window and optical head during a series of drilling and sampling tests. Credit: SELEX Galileo |
The first drill tool prototype in which the Ma_MISS optical parts (the lamp, optical head, optical fibres and connectors, and sapphire window) were integrated was developed in October 2009. An instrument prototype has been successfully tested for design validation in laboratory tests. A functional verification of some of its elements after integration in the drill has been performed in 2010.
Tests of the Ma_MISS breadboard with reference material (tuff, red brick) have been carried out to evaluate and characterise the performance of the system. The tests have demonstrated that the instrument is capable of acquiring accurate response signals, reflected from representative minerals, such as olivine and gypsum.
Further tests of the drill tool prototype and the integrated Ma_MISS engineering model with analogue Martian samples (e.g sandstone, basaltic lava, geyserite, gypsum) are planned to validate the drill system performance.
| Ma_MISS participants |
| Principal Investigator Maria Cristina De Sanctis, Istituto di Astrofisica Spaziale e Fisica Cosmica (IASF), INAF, Italy |
| ESA contact |
| ExoMars instrument system engineer Frederic Haessig, Directorate of Science and Robotic Exploration, European Space Agency |
| More instrument details |
| Ma_MISS on ExoMars: Mineralogical Characterization of the Martian Subsurface De Sanctis, M.C., et al., Astrobiology, July 2017, 17(6-7), 612-620 https://doi.org/10.1089/ast.2016.1541 |
The MicrOmega Infrared Spectrometer
 |
| MicrOmega instrument prototype. Credit: ESA - MicrOmega Team, Institut d'Astrophysique Spatiale |
MicrOmega is a micro-imaging system designed to identify, at grain scale, the mineralogical and the molecular composition of the Martian samples collected by the ExoMars drill.
MicrOmega is included in the suite of analytical instruments that, along with MOMA (Mars Organics Molecule Analyser) and RLS (Raman Laser Spectrometer), will characterise the collected samples, and specifically the organic substances they may contain.
In particular, MicrOmega will analyse the samples with a view to unravelling their geological origin and composition by examining the minerals that they contain. Some minerals can act as monitors of the physical and chemical conditions under which the materials are formed. These data will be vital to characterise the past and present geological processes, climate and environment of Mars and specifically, to help identify evidence of carbon or the past presence of water. They can, therefore, be used to assess whether these samples might have acted as a suitable habitat for life, and whether they have preserved bio-relics.
In addition, MicrOmega can be used to locate grains of particular interest (for example, grains that may have been processed by liquid water) in a totally non-destructive manner, so as to assign them as targets for Raman and MOMA LD-MS observations.
MicrOmega consists of a visible light microscope and a near infrared imaging spectrometer. The instrument acquires monochromatic images with a high resolution of 20 µm × 20 µm per pixel at a few wavelengths between 0.5 µm and 0.9 µm and with a continuous and high spectral sampling from 0.9 µm to 3.5 µm. Therefore, for each pixel MicrOmega acquires the entire spectrum in a spectral domain, enabling it to identify the composition of the samples at their grain scale.
Instrument update
 |
| Image of sulphate sample at a pixel level acquired by the MicrOmega prototype. Credit: ESA-MicrOmega Team, Institut d'Astrophysique Spatiale |
A number of tests for MicrOmega have been carried out using a prototype of the instrument to monitor its capability and performance. The MicrOmega prototype includes
- a monochromator, based on an acousto-optical tunable filter (AOTF) illumination system;
- the infrared magnification optics;
- the infrared focal plane;
- the thermal control system; and
- the sample container.
The prototype has acquired spectral images of samples at a pixel level, analysing their composition and identifying the minerals that the samples contain.
| MicrOmega participants |
| Principal Investigator Jean-Pierre Bibring, Institut d'Astrophysique Spatiale, Orsay, France Co-Principal Investigators Frances Westall, Centre de Biophysique Moléculaire, Orléans, France Nicolas Thomas, University of Bern, Switzerland |
| ESA contact |
| ExoMars instrument system engineer Frederic Didot, Directorate of Science and Robotic Exploration, European Space Agency |
| More instrument details |
| The MicrOmega Investigation Onboard ExoMars Bibring J.-P., Hamm V., Pilorget C., Vago J.L., and the MicrOmega Team, Astrobiology, July 2017, 17(6-7), 621-626 https://doi.org/10.1089/ast.2016.1642 |
RLS - Raman Laser Spectrometer
The Raman instrument provides a powerful tool for the definitive identification and characterisation of minerals and biomarkers. Raman spectroscopy is sensitive to the composition and structure of any mineral or organic compound. This capability provides direct information of potential organic compounds that can be related with present or past signatures of life on Mars as well as general mineralogical information for igneous, metamorphous, and sedimentary processes, especially water-related geo-processes.
The Raman laser spectrometer will be used:
- to identify organic compounds and search for signatures of life;
- to identify the mineral products and indicators of biological activities;
- to characterise mineral phases produced by water-related processes; and
- to characterise igneous minerals and their products resulting from alteration processes (e.g. oxidation).
Raman will also support the scientific measurements by correlating its spectral information with other spectroscopic and imaging instruments such as the MicrOmega Infrared Spectrometer. Furthermore, the Raman instrument is capable of measuring the sample at a fast-pace (within minutes) in order to release the selected sample for further analysis by other ExoMars instruments (e.g. the MOMA instrument).
The Raman instrument will collect and analyse the scattered light emitted by a laser on a sample (e.g. Martian rock). The spectral information received by the spectrometer (number of peaks, position and relative intensities) is determined by the molecular structure and composition of a compound, enabling the identification and characterisation of the Martian molecules, minerals and rocks. This method allows analysing the sample in a non-destructive way, which means that the sample remains intact for further analysis by other instruments.
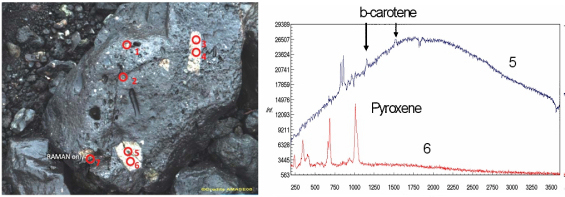 |
| In-situ analysis of basalt rocks using a Raman spectrometer. Credit: ESA-Raman team / AMASE |
The Raman instrument consists of three main units, the optical head, the spectrometer unit and the electronics unit, which are interconnected by an optical and electrical harness.
The flight model of the Raman laser spectrometer weighs slightly over 2kg in total including all necessary interconnecting harnesses, and consumes as little as ~30W of electrical power during operation.
 |
| Raman and Mossbauer Spectrometers during field tests. Credit: ESA-Raman team |
Instrument update
The instrument is currently in its design phase during which several sub-system prototypes and breadboards have been established and tested. Testing includes breadboard testing under simulated Martian conditions, sub-system prototype performance, environmental assessment (thermal, vibration and radiation tests) as well as field tests.
| RLS participants |
| Principal Investigator Fernando Rull Perez, Centro de Astrobiología, Unidad Asociada (CSIC-UVA), Spain Co-Principal Investigator Sylvestre Maurice, Laboratoire d'Astrophysique - Observatoire Midi-Pyrénées (LAOMP), France |
| ESA contact |
| ExoMars instrument system engineer Frederic Didot, Directorate of Science and Robotic Exploration, European Space Agency |
| More instrument details |
| The Raman Laser Spectrometer for the ExoMars Rover Mission to Mars Rull, F., et al., Astrobiology, July 2017, 17(6-7), 627-654 https://doi.org/10.1089/ast.2016.1567 |
MOMA - Mars Organics Molecule Analyser
MOMA is the largest instrument in the ExoMars Rover, and the one directly targeting biomarkers. MOMA will answer questions related to the potential origin, evolution and distribution of life on Mars. These studies will be carried out through two main activities:
- the detection of organic molecules, even at very low concentrations, and
- the possibility to establish their biotic or abiotic origin by molecular identification in terms of chirality (for more information about chirality and its role in distinguishing between biotic and abiotic origins, see the article about 'Life on Mars?', available as a link in the left-hand menu).
In addition to studying the samples collected by the drill, MOMA will also analyse gases in the Martian atmosphere.
MOMA has two complementary operational modes: Gas Chromatograph-Mass Spectrometry (MOMA GC-MS) and Laser Desorption-Mass Spectrometry (MOMA LD-MS).
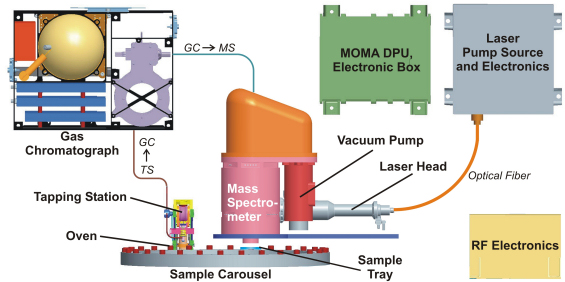 |
| The MOMA instrument and its modules. Credit: Max Planck Institute for Solar System Research |
The GC-MS mode will be used to identify and analyse volatile molecules found in Martian soil samples. The powdered sample material provided by the Rover's drill will be used to fill one of twenty one-time-use, small ovens. At high temperature, all volatile materials will evaporate and will be extracted to be routed to the gas chromatograph, where they will be separated and identified. Some ovens are filled with a chemical product, the derivatisation agent, used to transform the chemical compound into another similar compound, in order to make the samples suitable for chiral analysis. This type of analysis is an indicator of the biological versus abiotic origin of organic molecules. The separate volatile molecules will be ionised and then will be analysed individually with the mass spectrometer.
In the LD-MS mode, the powdered sample material is carefully positioned under a high-power laser head, which is then pulsed to liberate ions. The ions are guided into the mass spectrometer where they are analysed. This mode is used to study less volatile molecules and heat-resistant materials.
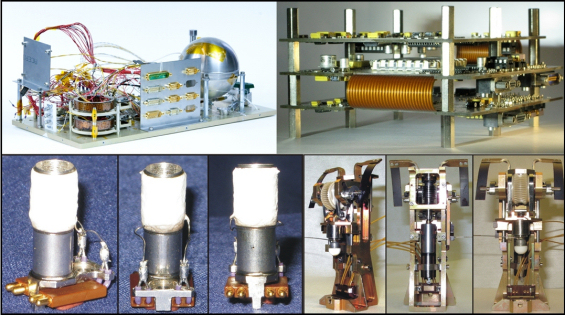 |
| From left to right: The MOMA Gas Chromatograph (GC) breadboard, GC electronics, oven and tapping station (not to scale) during development tests. Credit: Max Planck Institute for Solar System Research |
Instrument update
MOMA is a complex instrument with a number of components and modules, all of which have to work together – on the remote outpost of Mars - in a robust and reliable manner. At the end of 2009 a test campaign for the MOMA instrument was carried out at the Max Planck Institute for Solar System Research (MPS) to monitor how individual elements of MOMA – represented by instrument breadboards – perform when coupled together. The first test campaign coupled a gas chromatograph breadboard (GC) with ovens and the tapping station. Tests have also been performed at the Johns Hopkins University School of Medicine (JHU SoM) by coupling the GC with the MS which gave promising results. In addition, a field campaign using oven, tapping station and GC was performed at Svalbard (Norway) in August 2010. All three test campaigns were successful.
The next steps include the improvement of the breadboards and the performance of tests on the complete system, coupling all elements of the MOMA instrument.
| MOMA participants |
| Principal Investigator Fred Goesmann, Max Planck Institute for Solar System Research, Lindau, Germany Co-Principal Investigator Francois Raulin, University of Paris 12 and 7, Paris, France |
| ESA contact |
| ExoMars instrument system engineer Frederic Didot, Directorate of Science and Robotic Exploration, European Space Agency |
| More instrument details |
| The Mars Organic Molecule Analyzer (MOMA) Instrument: Characterization of Organic Material in Martian Sediments Goesmann, F., et al., Astrobiology, July 2017, 17(6-7), 655-685 https://doi.org/10.1089/ast.2016.1551 |